
Introduction
The navigating microbots of the future are synthetic, self-propelled colloids, mirrors of motile micro-organisms, which react with solute fuel in the environment, and convert the chemical energy of the reaction into mechanical motion. Current locomotion designs convert chemical energy to mechanical motion by incorporating a catalyst on part of the surface of the colloid locomotor (below). The catalyst mediates the reaction of fuel in the environment to product species, and both become asymmetrically distributed around the colloid. The gradients in reactant and product solutes generate propulsion through interaction with the colloid, e.g. repulsive short range or attractive van der Waals interactions for uncharged solutes (neutral diffusiophoresis), or electrostatic interactions in double layers of charge surrounding the motor for ionic solutes and colloids with surface charge (auto-electrophoresis and ionic diffusiophoresis). The products can also phase separate to form bubbles which apply a propulsive thrust.
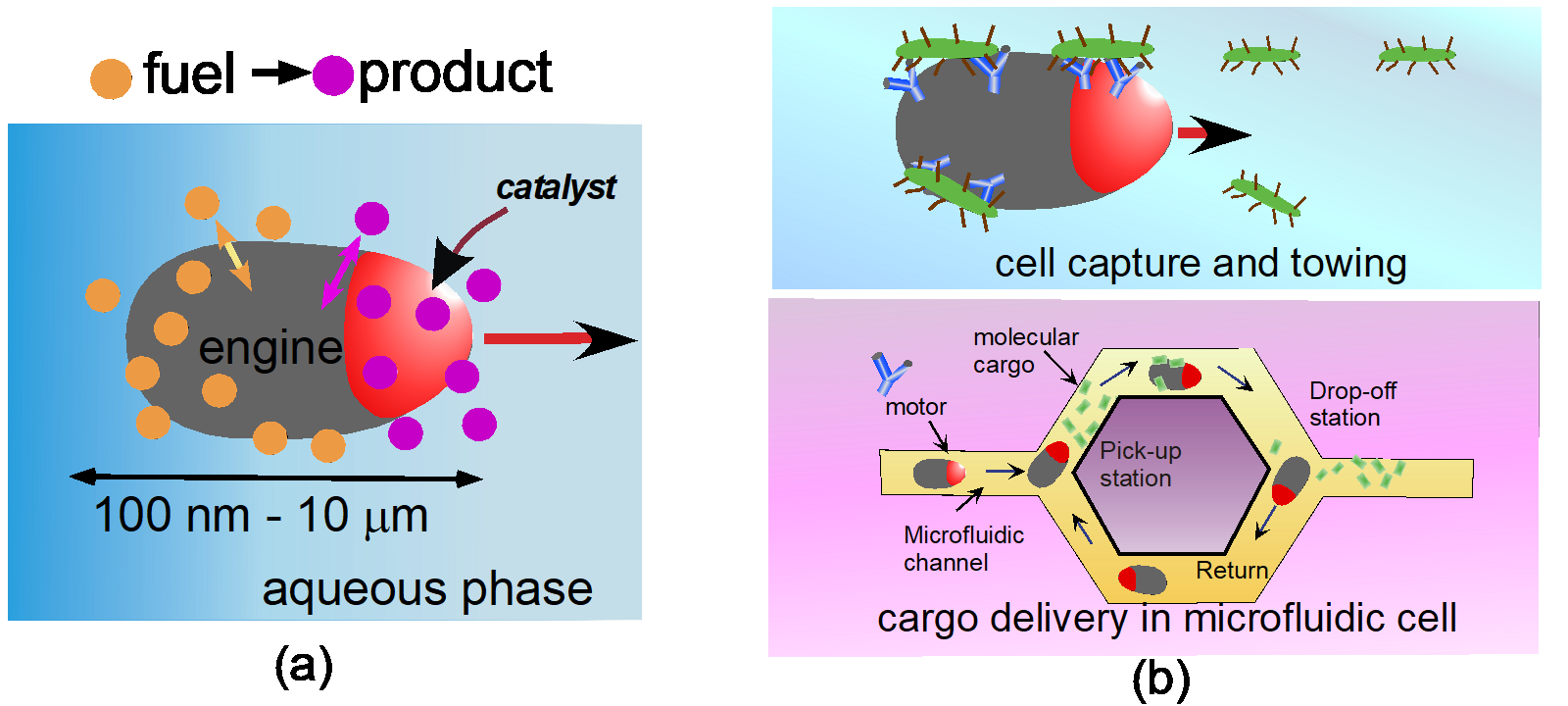
Technologies envision dispatching these locomotors into small scale environments to transverse the locales in applications including the transport of cargo in microfluidic cells, the delivery of therapeutics to targeted sites in an organism, tissue or even to the interior cytoplasm of a cell, the scavenging of environs for contaminants or cells, and the ferrying of macromolecules or nanoscale objects to a structure under assembly (see above).
Our Research
A central challenge in utilizing these engines as microbots is directing them along prescribed pathways, a critical task in many applications involving delivery or transport. With particles at this length scale, steering is particularly complicated because of the presence of thermal fluctuation forces (Brownian motion) which cause the locomotors to execute random walks rather than rectilinear motions. One approach to steerage is to use on board mechanisms for control, and this approach has been employed by embedding magnetic particles in the locomotor and defining magnetic fields along the landscape to maneuver the motor.
Our research studies theoretically how the hydrodynamic interaction of a colloidal motor with a boundary can passively guide the locomotor along the boundary without the need for an board steering mechanisms. We choose a locomotor design in which spherical colloids are partially coated with a catalyst cap that reacts with solute to produce a product. The product is repelled from the particle surface, causing the particle to move with the inert face at the front (autonomous motion via self-diffusiophoresis). When propelled towards a planar wall, we have demonstrated that these locomotors can exhibit, for large enough cap sizes, steady trajectories in which the particle either skims unidirectionally along the surface at a constant distance from the wall, or become stationary. (see movies below:
We have also studied the effects of thermal fluctuations (Brownian forces) on the skimming and stationary state motions. The Peclet number scales the ratio of deterministic to Brownian forces, and the smaller the Peclet number the more unpredictable the motion (see movies below).